Elimizde M25P128 Flash entegresine bilgisayarın seri portu üzerinden veri yazmak ve okumak amacıyla
tasarlanmış Şekil-1’deki gibi bir kart olduğunu düşünelim. Bu ödevde Şekil-1’de gösterilen SPI Flash
okuma kartı için, bilgisayarın seri portu üzerinden gelen komut ile M25P128 SPI Flash entegresinden
okuma yapabilen bir FPGA tasarımı yapınız. (Yazma yok)
M25P128 Entegresinin veri sayfasını aşağıdaki adresten indirebilirsiniz.
https://www.micron.com/~/media/documents/products/data-sheet/nor-flash/serial-nor/m25p/m25p128.pdf
Bilgisayardan gelen 4 byte okuma komutu şu şekilde olacaktır: |AA + 24 bit address|
Bu komut seri arayüzden gönderildikten sonra okuma işlemi yapılacak ve tek bir byte UART arayüzü
üzerinden bilgisayara gönderilcektir.
a) Ön tasarımı akış diyagramı şu şekildedir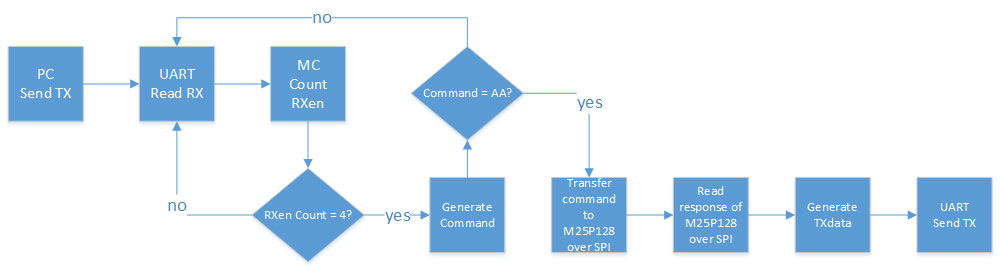
Bize ayrıca M25P128 entegresi gibi sinyal gönderecek bir modül gereklidir.
entity M25P128 is
Port ( S : in STD_LOGIC;
C : in STD_LOGIC;
D : in STD_LOGIC;
Q : out STD_LOGIC := 'Z');
end M25P128;
architecture Behavioral of M25P128 is
signal counter : integer := 0;
signal junkData : STD_LOGIC := '0';
begin
process (C,S) begin
if rising_edge(C) and S = '0' then
if (counter < 32) then
counter <= counter + 1;
end if;
end if;
if falling_edge(C) and S = '0' then
if (counter = 32) then
junkData <= not(junkData);
Q <= junkData;
end if;
end if;
if (S = '1') then
counter <= 0;
Q <= 'Z';
end if;
end process;
end Behavioral;
Modül için testbench kodu
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
entity tb_M25P128 is
-- Port ( );
end tb_M25P128;
architecture Behavioral of tb_M25P128 is
component M25P128 is
Port ( S : in STD_LOGIC;
C : in STD_LOGIC;
D : in STD_LOGIC;
Q : out STD_LOGIC);
end component;
signal S,C,D,Q : STD_LOGIC;
constant period : time := 10ns;
begin
MP : M25P128 port map(S => S,
C => C,
D => D,
Q => Q);
process begin
S <= '1';
D <= '0';
wait for 3*period;
S <= '0';
wait for 50*period;
S <= '1';
wait for 10*period;
S <= '0';
wait;
end process;
process begin
C <= '0';
wait for period/2;
C <= '1';
wait for period/2;
end process;
end Behavioral;
Simülasyon sonucu

b) UART arayüzü üzerinden haberleşme için gerekli kodu yazarak benzetimini yapalım.
-- Eric Bainville
-- Mar 2013
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
use IEEE.math_real.all;
entity uart is
generic (
DIVISOR: natural -- DIVISOR = 100,000,000 / (16 x BAUD_RATE)
-- 2400 -> 2604
-- 9600 -> 651
-- 115200 -> 54
-- 1562500 -> 4
-- 2083333 -> 3
);
port (
clk: in std_logic; -- clock
reset: in std_logic; -- reset
-- Client interface
rx_data: out std_logic_vector(7 downto 0); -- received byte
rx_enable: out std_logic; -- validates received byte (1 system clock spike)
tx_data: in std_logic_vector(7 downto 0); -- byte to send
tx_enable: in std_logic; -- validates byte to send if tx_ready is '1'
tx_ready: out std_logic; -- if '1', we can send a new byte, otherwise we won't take it
-- Physical interface
rx: in std_logic;
tx: out std_logic
);
end uart;
architecture Behavioral of uart is
constant COUNTER_BITS : natural := integer(ceil(log2(real(DIVISOR))));
type fsm_state_t is (idle, active); -- common to both RX and TX FSM
type rx_state_t is
record
fsm_state: fsm_state_t; -- FSM state
counter: std_logic_vector(3 downto 0); -- tick count
bits: std_logic_vector(7 downto 0); -- received bits
nbits: std_logic_vector(3 downto 0); -- number of received bits (includes start bit)
enable: std_logic; -- signal we received a new byte
end record;
type tx_state_t is
record
fsm_state: fsm_state_t; -- FSM state
counter: std_logic_vector(3 downto 0); -- tick count
bits: std_logic_vector(8 downto 0); -- bits to emit, includes start bit
nbits: std_logic_vector(3 downto 0); -- number of bits left to send
ready: std_logic; -- signal we are accepting a new byte
end record;
signal rx_state,rx_state_next: rx_state_t;
signal tx_state,tx_state_next: tx_state_t;
signal sample: std_logic; -- 1 clk spike at 16x baud rate
signal sample_counter: std_logic_vector(COUNTER_BITS-1 downto 0) := (others => '0'); -- should fit values in 0..DIVISOR-1
begin
-- sample signal at 16x baud rate, 1 CLK spikes
sample_process: process (clk,reset) is
begin
if reset = '1' then
sample_counter <= (others => '0');
sample <= '0';
elsif rising_edge(clk) then
if sample_counter = DIVISOR-1 then
sample <= '1';
sample_counter <= (others => '0');
else
sample <= '0';
sample_counter <= sample_counter + 1;
end if;
end if;
end process;
-- RX, TX state registers update at each CLK, and RESET
reg_process: process (clk,reset) is
begin
if reset = '1' then
rx_state.fsm_state <= idle;
rx_state.bits <= (others => '0');
rx_state.nbits <= (others => '0');
rx_state.enable <= '0';
tx_state.fsm_state <= idle;
tx_state.bits <= (others => '1');
tx_state.nbits <= (others => '0');
tx_state.ready <= '1';
elsif rising_edge(clk) then
rx_state <= rx_state_next;
tx_state <= tx_state_next;
end if;
end process;
-- RX FSM
rx_process: process (rx_state,sample,rx) is
begin
case rx_state.fsm_state is
when idle =>
rx_state_next.counter <= (others => '0');
rx_state_next.bits <= (others => '0');
rx_state_next.nbits <= (others => '0');
rx_state_next.enable <= '0';
if rx = '0' then
-- start a new byte
rx_state_next.fsm_state <= active;
else
-- keep idle
rx_state_next.fsm_state <= idle;
end if;
when active =>
rx_state_next <= rx_state;
if sample = '1' then
if rx_state.counter = 8 then
-- sample next RX bit (at the middle of the counter cycle)
if rx_state.nbits = 9 then
rx_state_next.fsm_state <= idle; -- back to idle state to wait for next start bit
rx_state_next.enable <= rx; -- OK if stop bit is '1'
else
rx_state_next.bits <= rx & rx_state.bits(7 downto 1);
rx_state_next.nbits <= rx_state.nbits + 1;
end if;
end if;
rx_state_next.counter <= rx_state.counter + 1;
end if;
end case;
end process;
-- RX output
rx_output: process (rx_state) is
begin
rx_enable <= rx_state.enable;
rx_data <= rx_state.bits;
end process;
-- TX FSM
tx_process: process (tx_state,sample,tx_enable,tx_data) is
begin
case tx_state.fsm_state is
when idle =>
if tx_enable = '1' then
-- start a new bit
tx_state_next.bits <= tx_data & '0'; -- data & start
tx_state_next.nbits <= "0000" + 10; -- send 10 bits (includes '1' stop bit)
tx_state_next.counter <= (others => '0');
tx_state_next.fsm_state <= active;
tx_state_next.ready <= '0';
else
-- keep idle
tx_state_next.bits <= (others => '1');
tx_state_next.nbits <= (others => '0');
tx_state_next.counter <= (others => '0');
tx_state_next.fsm_state <= idle;
tx_state_next.ready <= '1';
end if;
when active =>
tx_state_next <= tx_state;
if sample = '1' then
if tx_state.counter = 15 then
-- send next bit
if tx_state.nbits = 0 then
-- turn idle
tx_state_next.bits <= (others => '1');
tx_state_next.nbits <= (others => '0');
tx_state_next.counter <= (others => '0');
tx_state_next.fsm_state <= idle;
tx_state_next.ready <= '1';
else
tx_state_next.bits <= '1' & tx_state.bits(8 downto 1);
tx_state_next.nbits <= tx_state.nbits - 1;
end if;
end if;
tx_state_next.counter <= tx_state.counter + 1;
end if;
end case;
end process;
-- TX output
tx_output: process (tx_state) is
begin
tx_ready <= tx_state.ready;
tx <= tx_state.bits(0);
end process;
end Behavioral;
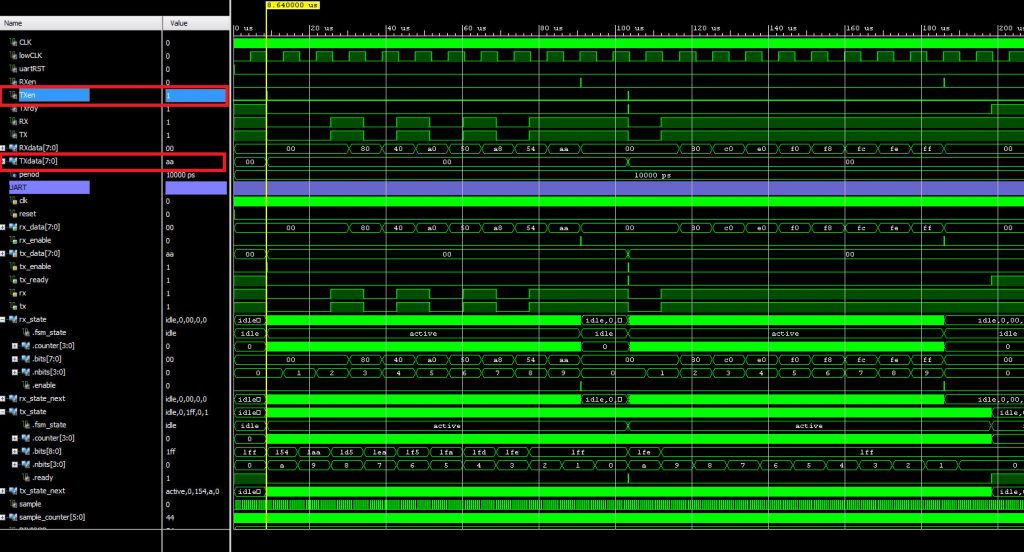
UART için testbench kodu
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
entity tb_UART is
-- Port ( );
end tb_UART;
architecture Behavioral of tb_UART is
component uart is
generic (
DIVISOR: natural
);
port (
clk: in std_logic; -- system clock
reset: in std_logic;
-- Client interface
rx_data: out std_logic_vector(7 downto 0); -- received byte
rx_enable: out std_logic; -- validates received byte (1 system clock spike)
tx_data: in std_logic_vector(7 downto 0); -- byte to send
tx_enable: in std_logic; -- validates byte to send if tx_ready is '1'
tx_ready: out std_logic; -- if '1', we can send a new byte, otherwise we won't take it
-- Physical interface
rx: in std_logic;
tx: out std_logic
);
end component;
signal CLK, uartRST, RXen, TXen, TXrdy, RX, TX : STD_LOGIC;
signal RXdata, TXdata : STD_LOGIC_VECTOR(7 downto 0);
constant period : time := 10ns; -- 100 MHz
signal lowCLK : STD_LOGIC;
begin
UART0 : uart
generic map (DIVISOR => 54) -- 115200
port map (
clk => CLK, reset => uartRST,
rx_data => RXdata, rx_enable => RXen,
tx_data => TXdata, tx_enable => TXen, tx_ready => TXrdy,
rx => RX,
tx => TX
);
process begin
CLK <= '0';
wait for period/2;
CLK <= '1';
wait for period/2;
end process;
process begin
lowCLK <= '0';
wait for 864*period/2;
lowCLK <= '1';
wait for 864*period/2;
end process;
process begin
uartRST <= '1';
wait for 10*period;
uartRST <= '0';
wait;
end process;
process begin
TXen <= '0';
TXdata <= (others => '0');
wait for 864*period;
TXdata <= X"AA";
TXen <= '1';
wait for 1*period;
TXdata <= X"00";
TXen <= '0';
wait until TXrdy = '1';
TXdata <= X"FF";
TXen <= '1';
wait for 1*period;
TXdata <= X"00";
TXen <= '0';
wait;
end process;
RX <= TX;
end Behavioral;
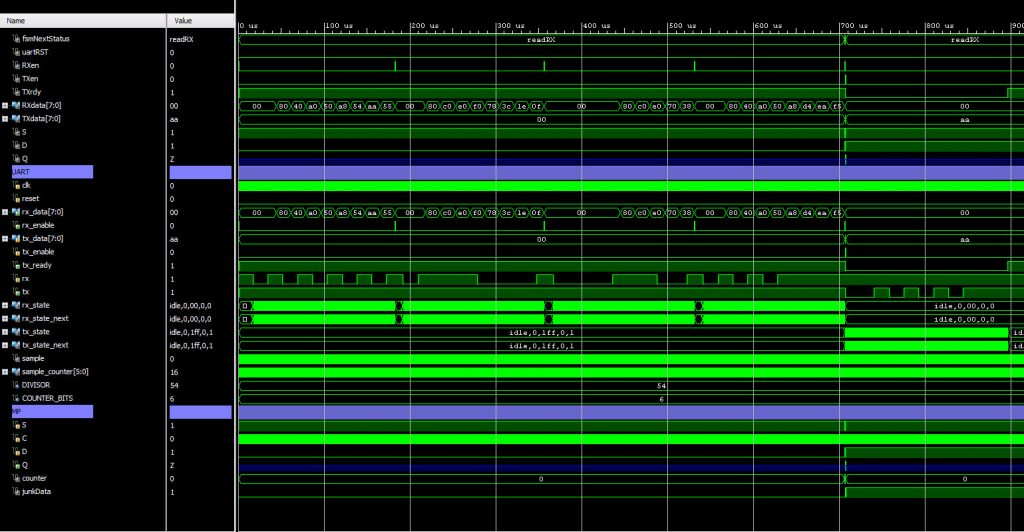
UART Modülü için benzetim sonuçları, burada TX sinyali devreye giriş olarak geri verildiği için RX sinyalinde de doğru oluştuğu gözlenebilmektedir.
c) M25P128 entegresini SPI arayüzü üzerinden okuyan ve diğer modülleri içeren ana modülü yazalım.
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity ZC0720FPGA is
Port ( CLK : in STD_LOGIC;
RX : in STD_LOGIC;
TX : out STD_LOGIC := '0');
end ZC0720FPGA;
architecture Behavioral of ZC0720FPGA is
component uart is
generic (
DIVISOR: natural
);
port (
clk: in std_logic; -- system clock
reset: in std_logic;
-- Client interface
rx_data: out std_logic_vector(7 downto 0); -- received byte
rx_enable: out std_logic; -- validates received byte (1 system clock spike)
tx_data: in std_logic_vector(7 downto 0); -- byte to send
tx_enable: in std_logic; -- validates byte to send if tx_ready is '1'
tx_ready: out std_logic; -- if '1', we can send a new byte, otherwise we won't take it
-- Physical interface
rx: in std_logic;
tx: out std_logic
);
end component;
component M25P128 is
Port ( S : in STD_LOGIC;
C : in STD_LOGIC;
D : in STD_LOGIC;
Q : out STD_LOGIC);
end component;
signal Dcounter : integer := 31;
signal Qcounter : STD_LOGIC_VECTOR(4 downto 0) := (others => '0');
signal data : STD_LOGIC_VECTOR(7 downto 0) := (others => '0');
signal command : STD_LOGIC_VECTOR(31 downto 0) := (others => '0');
signal commandReady : STD_LOGIC := '0';
signal RXcounter : STD_LOGIC_VECTOR(3 downto 0) := (others => '0');
type fsmState is (readRX, writeD, readQ, writeTX);
signal fsmStatus, fsmNextStatus : fsmState;
signal uartRST, RXen, TXen, TXrdy : STD_LOGIC := '0';
signal RXdata, TXdata : STD_LOGIC_VECTOR(7 downto 0) := (others => '0');
signal Q : STD_LOGIC;
signal S, D : STD_LOGIC := '0';
begin
UART0 : uart
generic map (DIVISOR => 54) -- 50,000,000 / 115200 / 16
port map (
clk => CLK, reset => uartRST,
rx_data => RXdata, rx_enable => RXen,
tx_data => TXdata, tx_enable => TXen, tx_ready => TXrdy,
rx => RX,
tx => TX
);
MP : M25P128
port map(S => S,
C => CLK,
D => D,
Q => Q);
process (fsmStatus) begin
case fsmStatus is
when readRX => S <= '1';
when writeD => S <= '0';
when readQ => S <= '0';
when writeTX => S <= '1';
when others => null;
end case;
end process;
process (CLK) begin
if falling_edge(CLK) then
if fsmStatus = writeD then
if (Dcounter > 0) then
D <= command(Dcounter);
Dcounter <= Dcounter - 1;
elsif (Dcounter = 0) then
fsmNextStatus <= readQ;
Dcounter <= 31;
end if;
end if;
elsif rising_edge(CLK) then
if fsmStatus = readRX then
TXen <= '0';
commandReady <= '0';
if RXen = '1' then
RXcounter <= RXcounter + '1';
command(31 downto 0) <= command(23 downto 0) & RXdata(0) & RXdata(1) & RXdata(2) & RXdata(3) & RXdata(4) & RXdata(5) & RXdata(6) & RXdata(7);
end if;
if (RXcounter = "0100") then
RXcounter <= "0000";
commandReady <= '1';
end if;
if (command(31 downto 24) = X"AA") and commandReady = '1' then
fsmNextStatus <= writeD;
end if;
end if;
if fsmStatus = readQ then
if (Qcounter < 8) then
TXdata(7 downto 0) <= TXdata(6 downto 0) & Q;
Qcounter <= Qcounter + 1;
elsif (Qcounter = 8) then
fsmNextStatus <= writeTX;
end if;
end if;
if fsmStatus = writeTX and TXrdy = '1' then
TXen <= '1';
fsmNextStatus <= readRX;
end if;
end if;
end process;
process (CLK) begin
fsmStatus <= fsmNextStatus;
end process;
end Behavioral;
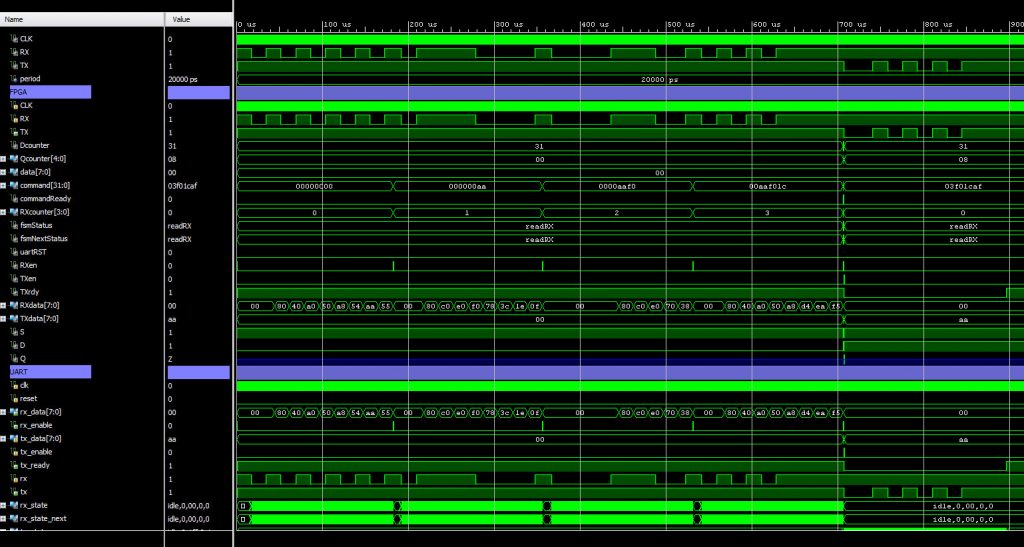
d) Projeyi bütün halinde test etmek için bir testbench yazarak XSIM ile benzetimini yapalım.
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
entity tb_FPGA is
-- Port ( );
end tb_FPGA;
architecture Behavioral of tb_FPGA is
component ZC0720FPGA is
Port ( CLK : in STD_LOGIC;
RX : in STD_LOGIC;
TX : out STD_LOGIC);
end component;
constant period : time := 20ns; -- 50 MHz
signal CLK, RX, TX : STD_LOGIC;
begin
FPGA: ZC0720FPGA
port map(
CLK => CLK,
RX => RX,
TX => TX);
process begin
CLK <= '0';
wait for period/2;
CLK <= '1';
wait for period/2;
end process;
process begin
RX <= '1';
wait for 864*period;
RX <= '0'; -- Start
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1'; -- Stop
wait for 864*period;
RX <= '1';
wait for 100*period;
RX <= '0'; -- Start
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1'; -- Stop
wait for 864*period;
RX <= '1';
wait for 100*period;
RX <= '0'; -- Start
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1'; -- Stop
wait for 864*period;
RX <= '1';
wait for 100*period;
RX <= '0'; -- Start
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '0';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1';
wait for 864*period;
RX <= '1'; -- Stop
wait for 864*period;
RX <= '1';
wait for 16*period;
wait;
end process;
end Behavioral;
Benzetim sonuçları