
İçerik
SORU 1
cember01 isimli bir fonksiyon yazın. Fonksiyonun girişleri sırasıyla aşağıdaki gibi olmalıdır:
- Çemberin merkezinin x koordinatı (xc)
- Çemberin merkezinin y koordinatı (yc)
- Çemberin yarıçapı (r)
- Çizim yapılıp yapılmayacağını gösteren bir parametre (cizdir)
Fonksiyonun çıktıları da sırasıyla aşağıdaki gibi olmalıdır:
- Çemberin alanı (alan)
- Çemberin çevresi (cevre)
- Çemberin merkezinin orijine uzaklığı (uzaklik)
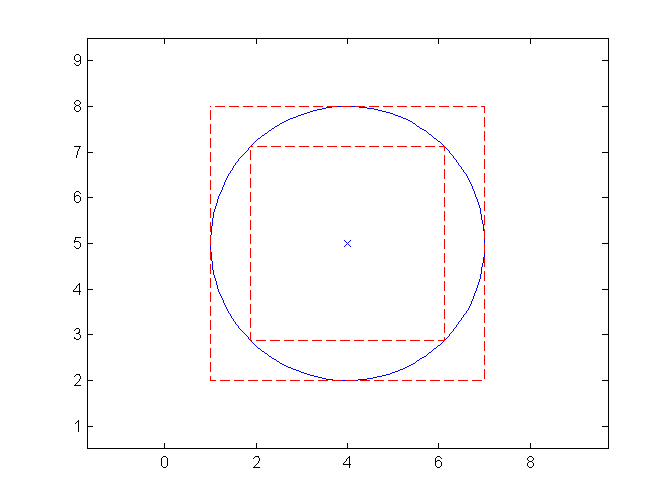
Ayrıca, eğer cizdir parametresi true olarak verilirse bir şekil üzerine:
- Mavi düz cizgi ile çember çizdirilmeli,
- Çarpı (x) işarei ile çemberin merkezi işaretlenmeli,
- Kesikli kırmızı çizgi ile çemberin içine sığacak en büyük kare çizdirilmeli
- Kesikli kırmızı çizgi ile çemberin içine alacak en küçük kare çizdirilmelidir.
Yukarıda belirtilen tüm çizimler, AYNI şekil üzerinde olmalıdır. Eğer cizdir parametresi false olarak verilirse herhangi bir şekil açılmamalı ve çizim yapılmamalıdır.
SORU 1’deki fonksiyonun bir örnek kullanımı
Merkezi (4,5) ve yarıçapı 3 olan çember için alan, çevre, merkezin orijine olan uzaklığını hesapla, çemberi ve iç-dış kareleri çizdir:
[alan, cevre, uzaklik] = cember01(4,5,3,true)
alan =
28.2743
cevre =
18.8496
uzaklik =
6.4031
SORU 1’deki fonksiyonun başka bir örnek kullanımı
Merkezi (-1,-3) ve yarıçapı 5 olan çember için alan, çevre, merkezin orijine olan uzaklığını hesapla, şekil çizdirme:
[alan, cevre, uzaklik] = cember01(-1,-3,5,false)
alan =
78.5398
cevre =
31.4159
uzaklik =
3.1623
SORU 2
Yukarıdaki sarkaç sisteminin hareketini tanımlayan türevsel deneklemler aşağıdaki gibi yazılabilir: 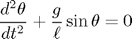
Burada  sarkacın dikey eksenle yaptığı açı (
sarkacın dikey eksenle yaptığı açı ( ),
),  yerçekimi ivmesi (
yerçekimi ivmesi ( ) ve
) ve  de çubuğun uzunluğudur (
de çubuğun uzunluğudur ( ).
).
Bu denklemleri çözdüren ve çizdiren bir sarkac01 fonksiyonu yazın. Fonksiyonun girişleri sırasıyla aşağıdaki gibi olmalıdır:
- cinsinder yerçekimi ivmesi (g)
- cinsinden çubuğun uzunluğu (l)
- cinsinden başlangıç açısı (theta0)
 cinsinder başlangıç açısal hızı (dtheta0)
cinsinder başlangıç açısal hızı (dtheta0)- Saniye cinsinden simülasyon zamanı (tson)
Fonksiyonun çıktıları da sırasıyla aşağıdaki gibi olmalıdır:
- Çözümün hesaplandığı zaman anlarından oluşan vektör (t)
- t anlarındaki açı değerlerinden oluşan vektör (theta). Açı değeri her zaman
![$[-\pi,\pi]$](/wp-content/uploads/2013/03/odev01Aciklama02_eq13028.png) aralığında verilmelidir. ode çözücüleri bu aralığın dışında değerler verse bile (mesela sarkacın takla attığı durumlarda), fonksiyon çıkışında bunlar düzeltilmelidir.
aralığında verilmelidir. ode çözücüleri bu aralığın dışında değerler verse bile (mesela sarkacın takla attığı durumlarda), fonksiyon çıkışında bunlar düzeltilmelidir. - t anlarındaki açısal hız değerlerinden oluşan vektör (dtheta)
Fonksiyon ayrıca aşağıdakileri de ekrana AYNI şekil üzerinde çizdirmelidir:
- [0,tson] aralığında açının değişimi (mavi düz koyu çizgiyle)
- [0,tson] aralığında açısal hızın değişimi (yeşil düz koyu çizgiyle)
Çizimin başlığı ve eksenlerin isimlendirmesi olmalıdır.
İPUCU: Türevsel denklemi MATLAB’ın çözebileceği formata getirmek için öncelikle sadece birinci türevin olduğu denklemler yazmalıyız. Bunun için  ve
ve  olarak iki elemanlı bir
olarak iki elemanlı bir  vektörü düşünün ve türevini hesaplayan bir fonksiyon yapın. Ondan sonra bu fonksiyonu ve ode fonksyonlarını kullarak çözümü elde edin. Birden fazla değişken içeren adi türevsel denklemlerin (ODE) çözümüyle ilgili örnekler için yardım dokümanına bakabilirsizin. (doc ode45 yazarak bu dokümana ulaşabilirsiniz)
vektörü düşünün ve türevini hesaplayan bir fonksiyon yapın. Ondan sonra bu fonksiyonu ve ode fonksyonlarını kullarak çözümü elde edin. Birden fazla değişken içeren adi türevsel denklemlerin (ODE) çözümüyle ilgili örnekler için yardım dokümanına bakabilirsizin. (doc ode45 yazarak bu dokümana ulaşabilirsiniz)
SORU 2’deki fonksiyonun bir örnek kullanımı
Yerçekimi ivmesi  , çubuk uzunluğu
, çubuk uzunluğu  için başlangıçta
için başlangıçta  açıyla ve hareketsiz olarak (yani
açıyla ve hareketsiz olarak (yani  ) olarak duran sarkacın
) olarak duran sarkacın  saniyelik hareketi:
saniyelik hareketi:
[t, theta, dtheta] = sarkac01(9.8,1,30*pi/180,0,6)
t =
0
0.0000
0.0000
0.0000
0.0000
0.0001
0.0001
0.0002
0.0002
0.0005
0.0008
0.0010
0.0013
0.0026
0.0038
0.0051
0.0064
0.0128
0.0192
0.0256
0.0320
0.0641
0.0961
0.1281
0.1602
0.2207
0.2811
0.3416
0.4021
0.4703
0.5385
0.6067
0.6749
0.7356
0.7962
0.8569
0.9176
0.9862
1.0548
1.1235
1.1921
1.2547
1.3173
1.3799
1.4425
1.5108
1.5792
1.6475
1.7158
1.7773
1.8387
1.9001
1.9616
2.0309
2.1002
2.1696
2.2389
2.3026
2.3662
2.4299
2.4935
2.5621
2.6306
2.6991
2.7677
2.8302
2.8927
2.9552
3.0177
3.0880
3.1583
3.2287
3.2990
3.3640
3.4289
3.4939
3.5589
3.6276
3.6963
3.7650
3.8337
3.8976
3.9615
4.0253
4.0892
4.1608
4.2324
4.3040
4.3756
4.4420
4.5084
4.5749
4.6413
4.7100
4.7787
4.8475
4.9162
4.9818
5.0475
5.1131
5.1787
5.2455
5.3122
5.3789
5.4457
5.5129
5.5801
5.6473
5.7145
5.7777
5.8408
5.9040
5.9671
5.9754
5.9836
5.9918
6.0000
theta =
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5236
0.5235
0.5235
0.5232
0.5227
0.5220
0.5211
0.5136
0.5011
0.4838
0.4619
0.4084
0.3408
0.2612
0.1724
0.0650
-0.0453
-0.1536
-0.2549
-0.3355
-0.4043
-0.4589
-0.4975
-0.5206
-0.5208
-0.4980
-0.4531
-0.3947
-0.3216
-0.2363
-0.1421
-0.0332
0.0773
0.1841
0.2827
0.3606
0.4254
0.4750
0.5077
0.5232
0.5152
0.4839
0.4307
0.3647
0.2846
0.1933
0.0945
-0.0161
-0.1259
-0.2299
-0.3234
-0.3962
-0.4541
-0.4953
-0.5184
-0.5218
-0.5011
-0.4571
-0.3917
-0.3150
-0.2255
-0.1267
-0.0228
0.0881
0.1949
0.2928
0.3773
0.4408
0.4873
0.5150
0.5231
0.5086
0.4697
0.4080
0.3265
0.2365
0.1365
0.0306
-0.0767
-0.1842
-0.2832
-0.3693
-0.4388
-0.4869
-0.5153
-0.5229
-0.5094
-0.4748
-0.4203
-0.3479
-0.2608
-0.1617
-0.0556
0.0530
0.1593
0.2529
0.3367
0.4076
0.4631
0.4691
0.4747
0.4801
0.4852
dtheta =
0
-0.0001
-0.0001
-0.0002
-0.0002
-0.0005
-0.0007
-0.0010
-0.0012
-0.0025
-0.0037
-0.0050
-0.0062
-0.0125
-0.0188
-0.0251
-0.0313
-0.0627
-0.0941
-0.1254
-0.1567
-0.3121
-0.4648
-0.6133
-0.7564
-1.0070
-1.2245
-1.4005
-1.5282
-1.6079
-1.6147
-1.5478
-1.4114
-1.2380
-1.0226
-0.7731
-0.4986
-0.1696
0.1663
0.4954
0.8044
1.0575
1.2732
1.4424
1.5580
1.6171
1.6025
1.5146
1.3588
1.1680
0.9369
0.6741
0.3891
0.0529
-0.2855
-0.6120
-0.9130
-1.1555
-1.3551
-1.5030
-1.5926
-1.6193
-1.5717
-1.4522
-1.2677
-1.0514
-0.7982
-0.5173
-0.2191
0.1248
0.4634
0.7821
1.0668
1.2880
1.4587
1.5703
1.6179
1.5961
1.5010
1.3376
1.1150
0.8653
0.5843
0.2826
-0.0289
-0.3765
-0.7075
-1.0066
-1.2593
-1.4410
-1.5622
-1.6164
-1.6012
-1.5134
-1.3571
-1.1402
-0.8740
-0.5859
-0.2760
0.0441
0.3626
0.6728
0.9568
1.2025
1.3991
1.5379
1.6097
1.6103
1.5401
1.4131
1.2329
1.0070
0.7450
0.7088
0.6722
0.6352
0.5978

SORU 2’deki fonksiyonun başka bir örnek kullanımı
Yerçekimi ivmesi , çubuk uzunluğu  için başlangıç açıcısı
için başlangıç açıcısı  ve başlangıç hızı
ve başlangıç hızı  olan sarkacın
olan sarkacın  saniyelik hareketi:
saniyelik hareketi:
[t, theta, dtheta] = sarkac01(9.8,2,10*pi/180,5,10)
t =
0
0.0018
0.0035
0.0053
0.0070
0.0158
0.0246
0.0333
0.0421
0.0859
0.1298
0.1736
0.2174
0.3004
0.3834
0.4664
0.5494
0.6515
0.7536
0.8557
0.9578
1.0781
1.1984
1.3188
1.4391
1.5422
1.6453
1.7485
1.8516
1.9358
2.0200
2.1042
2.1884
2.2726
2.3568
2.4410
2.5252
2.6412
2.7571
2.8730
2.9890
3.0913
3.1937
3.2961
3.3984
3.4745
3.5506
3.6267
3.7028
3.7789
3.8550
3.9311
4.0072
4.1026
4.1980
4.2934
4.3888
4.5029
4.6171
4.7313
4.8455
4.9439
5.0423
5.1407
5.2391
5.3158
5.3924
5.4690
5.5456
5.6222
5.6988
5.7755
5.8521
5.9750
6.0980
6.2210
6.3439
6.4820
6.6202
6.7583
6.8964
6.9742
7.0521
7.1299
7.2077
7.2855
7.3634
7.4412
7.5190
7.6165
7.7140
7.8115
7.9090
8.0282
8.1474
8.2666
8.3858
8.4861
8.5864
8.6867
8.7871
8.8688
8.9506
9.0323
9.1141
9.1959
9.2776
9.3594
9.4411
9.5640
9.6869
9.8098
9.9327
9.9495
9.9663
9.9832
10.0000
theta =
0.1745
0.1833
0.1921
0.2008
0.2096
0.2533
0.2970
0.3405
0.3839
0.5986
0.8079
1.0105
1.2051
1.5490
1.8596
2.1381
2.3882
2.6651
2.9187
-3.1226
-2.8797
-2.5766
-2.2346
-1.8354
-1.3683
-0.9127
-0.4175
0.0982
0.6098
1.0061
1.3736
1.7077
2.0074
2.2756
2.5175
2.7389
2.9467
-3.0601
-2.7781
-2.4721
-2.1251
-1.7731
-1.3711
-0.9195
-0.4279
-0.0473
0.3343
0.7069
1.0615
1.3911
1.6933
1.9675
2.2156
2.4954
2.7483
2.9839
-3.0707
-2.7926
-2.4921
-2.1520
-1.7588
-1.3701
-0.9358
-0.4642
0.0284
0.4121
0.7844
1.1367
1.4633
1.7612
2.0311
2.2754
2.4978
2.8210
3.1210
-2.8638
-2.5448
-2.1377
-1.6515
-1.0728
-0.4130
-0.0199
0.3735
0.7565
1.1195
1.4557
1.7628
2.0411
2.2929
2.5777
2.8378
3.0836
-2.9566
-2.6477
-2.3049
-1.9089
-1.4477
-1.0062
-0.5245
-0.0188
0.4885
0.8856
1.2578
1.5994
1.9084
2.1864
2.4379
2.6682
2.8834
-3.0904
-2.7766
-2.4352
-2.0454
-1.9872
-1.9277
-1.8670
-1.8049
dtheta =
5.0000
4.9985
4.9969
4.9952
4.9934
4.9836
4.9719
4.9584
4.9432
4.8420
4.7033
4.5340
4.3420
3.9449
3.5437
3.1749
2.8631
2.5765
2.4060
2.3557
2.4259
2.6568
3.0528
3.5863
4.1761
4.6365
4.9448
5.0219
4.8488
4.5518
4.1709
3.7585
3.3621
3.0168
2.7380
2.5360
2.4152
2.3822
2.5088
2.7923
3.2152
3.6781
4.1744
4.6290
4.9445
5.0322
4.9799
4.7946
4.5056
4.1560
3.7847
3.4254
3.1028
2.7743
2.5432
2.4165
2.3967
2.5105
2.7790
3.1910
3.7079
4.1894
4.6248
4.9313
5.0380
4.9561
4.7463
4.4389
4.0762
3.7027
3.3482
3.0357
2.7795
2.5023
2.4022
2.4834
2.7393
3.2067
3.8366
4.5145
4.9971
5.0790
5.0131
4.8091
4.5008
4.1362
3.7566
3.3971
3.0825
2.7748
2.5749
2.4894
2.5199
2.7090
3.0703
3.5789
4.1600
4.6235
4.9599
5.0881
4.9759
4.7228
4.3731
3.9767
3.5819
3.2278
2.9335
2.7117
2.5692
2.5058
2.6330
2.9469
3.4190
3.4934
3.5698
3.6480
3.7276
 Şekilden sarkacın takla attığı anlaşılabilir. Açı değerinin her zaman arasında verildiğine dikkat ediniz. (Şekildeki zıplamalar da bu yüzden olmaktadır; aslında
Şekilden sarkacın takla attığı anlaşılabilir. Açı değerinin her zaman arasında verildiğine dikkat ediniz. (Şekildeki zıplamalar da bu yüzden olmaktadır; aslında  olduğundan sarkacın hareketinde bir süreksizlik yoktur)
olduğundan sarkacın hareketinde bir süreksizlik yoktur)