Ters Sarkaç Taşıyan Araba Sistemi
İçerik
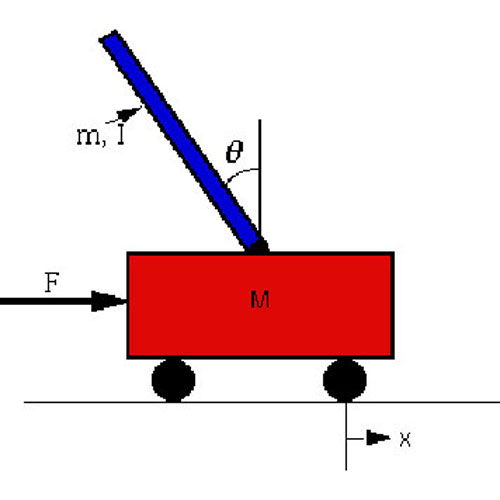
Ters Sarkaç Taşıyan Araba Sisteminin Modellenmesi
Aşağıdaki gibi bir ters sarkaç-araba sistemi için
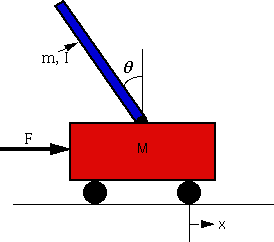
Sistemi modellemek için şu parametreleri kullanalım:
- Sisteme uygulanan itme kuvveti,

- Arabanın kütlesi

- Sarkacın kütlesi

- Sarkacın uzunluğu

- Sarkacın düşey eksenle yaptığı açı

- Sarkacın atalet momenti

- Aracın konumu

- Zeminin sürtünme katsayısı
 ,
,
Sistemin dinamiğini incelersek:
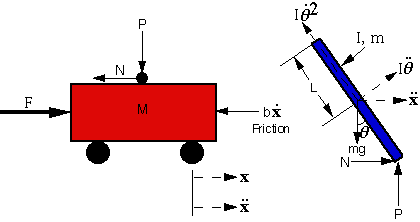
Sarkaç-araba düzeneği F kuvveti etkisiyle yatay eksende hareket ettiğinden araba üzerine etkiyen net kuvveti şu şekilde yazabiliriz:

Arabanın hareketi sarkaç üzerinde bir tepki kuvveti doğurur. Bu tepki sarkacın devrilmesine sebep olan kuvvettir. Benzer şekilde sarkaç üzerine etkiyen kuvvet:

olarak yazılabilir. Bulduğumuz bu değeri ilk denklemde yerine yazarsak:

elde edilir. Sarkacın dönme hareketini tanımlayan denklemi şöyle yazabiliriz:

Denklemdeki P ve N terimlerinden kurtulmak için sarkacın momentini hesaplarsak:

elde edilir. Bu iki eşitlikten faydalanarak,

ifadesi elde edilir.
Soru 1: Sistemin Matlab ve Simulink ile Modellenmesi
- Yukarıdaki sistemi M = 0.5; m = 0.2; b = 0.1; I = 0.006; g = 9.8; L = 0.3; parametre değerleri için Matlab’da simulink kullanmadan modelleyin. Birim basamak tepkisini hesaplayın ve gerekli kodları ve grafiği raporunuza koyun. Sonuçla ilgili yorumlarınızı raporda belirtin.
- Yukarıdaki sistemi aynı parametre değerleri için Simulink’de modelleyin. Birim basamak tepkisini hesaplayın ve gerekli model dosyalarını ve grafiği raporunuza koyun. Sonuçla ilgili yorumlarınızı raporda belirtin.
Soru 2: Sistemin PID Kontrolcü ile Kontrolü
- Hazırladığınız simulink modelinde araca uygulanan kuvveti (F) değiştirerek sarkacın açısını istenen açıda
 tutacak bir PID kontrolcü tasarlayın. Hazırladığınız kontolcünün
tutacak bir PID kontrolcü tasarlayın. Hazırladığınız kontolcünün  için sistem üzerinde aşağıdaki şartları sağladığından emin olun.
için sistem üzerinde aşağıdaki şartları sağladığından emin olun.
- Sistemin oturma zamanı (x ve
 için) 5s’yi geçmemeli.
için) 5s’yi geçmemeli. - Sarkacın açısı (hiçbir zaman) 20 dereceyi (0.35 rad) geçmemeli.
Tasarlanan kontrolcünün doğrusal olmayan sistem modeli üzerinde düzgün çalıştığını gösterin. Tasarlama sürecini, gerekli model ve kod dosyalarını rapora ekleyin. İzlenen süreçle ve sonuçla ilgili yorumlarınızı raporda belirtin.
Soru 3: Sistemin Doğrusallaştırılması
- Yukarıdaki sistemi
 noktası etrafında doğrusallaştırın. Doğrusallaştırılmış sistem için durum uzayı gösterimini ve transfer fonksiyonunu bulun. Doğrusal ve doğrusal olmayan sistemler için birim basamak cevaplarını kıyaslayın ve sonuçları raporunuzda yorumlayın.
noktası etrafında doğrusallaştırın. Doğrusallaştırılmış sistem için durum uzayı gösterimini ve transfer fonksiyonunu bulun. Doğrusal ve doğrusal olmayan sistemler için birim basamak cevaplarını kıyaslayın ve sonuçları raporunuzda yorumlayın.
- Doğrusallaştırılmış bu sistem için bir Kalman filtresi tasarlayın. Farklı filtre parametreleri (Q = [1,1000] ve R = [1,1000] için) için sinyale oranla %10, %50 ve %100 işlem ve çıkış gürültüleri altında simülasyonunu yaparak, gerekli kodları, sonuçları ve yorumunuzu raporunuza ekleyin.
- Oluşturduğunuz filtreyi doğrusal olmayan sistem üzerinde deneyin. Kodları ve sonuçları yorumlayarak raporunuza ekleyin.
Bu soruyu ister Matlab’da ister Simulink’te isterseniz de ikisi karışık olarak çözebilirsiniz.
Soru 4: Referans Takibi için Durum Geri Beslemesi
- 3. Soruda elde ettiğiniz doğrusallaştırılmış sisteminde referans takibi için bir durum geri beslemesi tasarlayın ve kontrolü yapın. Gerekli kodları, modülleri ve elde ettiğiniz sonuçları yorumlayarak raporunuza koyun.
- Sistemin oturma zamanı 5s’yi geçmemeli.
- Sarkacın açısı (hiçbir zaman) 3 dereceyi (0.0525 radyanı) geçmemeli.
Elde ettiğiniz kontrolcüyü doğrusal olmayan sistem üzerinde deneyin ve istenen şartları sağladığından emin olun.
Bu soruyu ister Matlab’da ister Simulink’te isterseniz de ikisi karışık olarak çözebilirsiniz.